" SR-17” Quadruped Rig
Summary
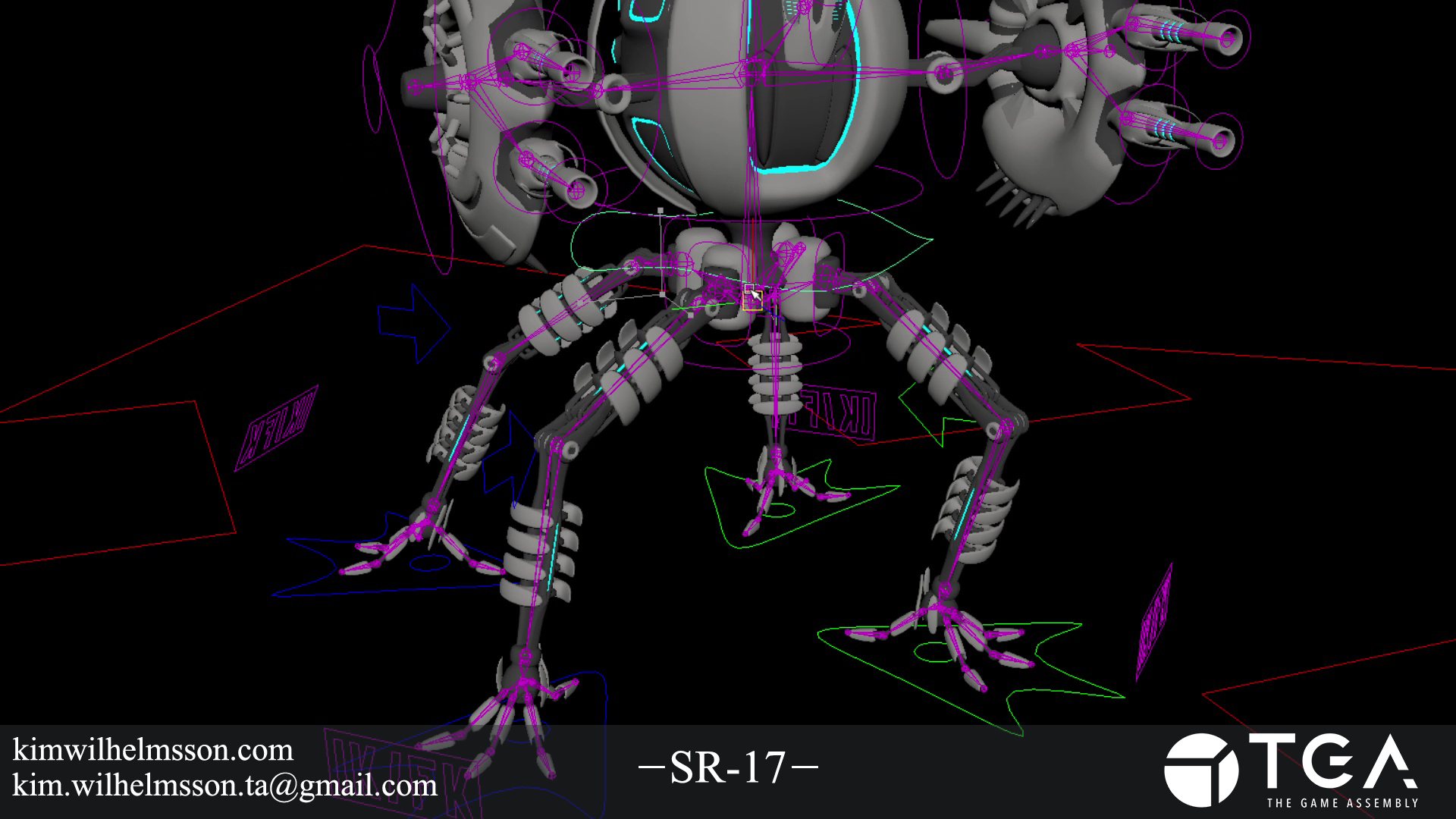
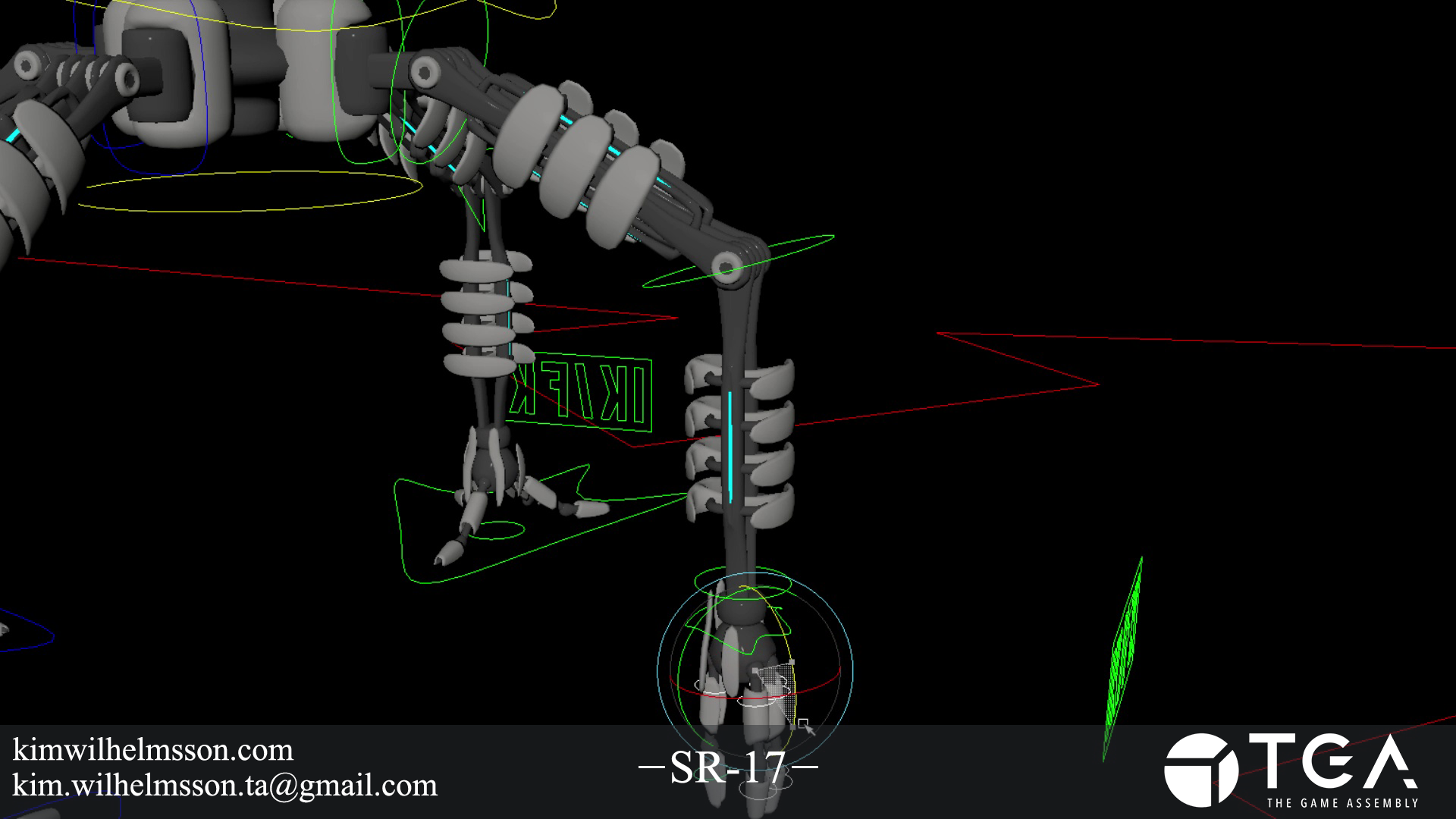
This is the first specialization project I made during my time at TGA, which I spent four weeks working on. When it comes to rigging you always have to be flexible and to make any character move as intended, while not being too complex to handle, therefore I needed experience in rigging something else than a plain biped human. It was apparent that I needed to do something with more limbs and different body proportions than a human.
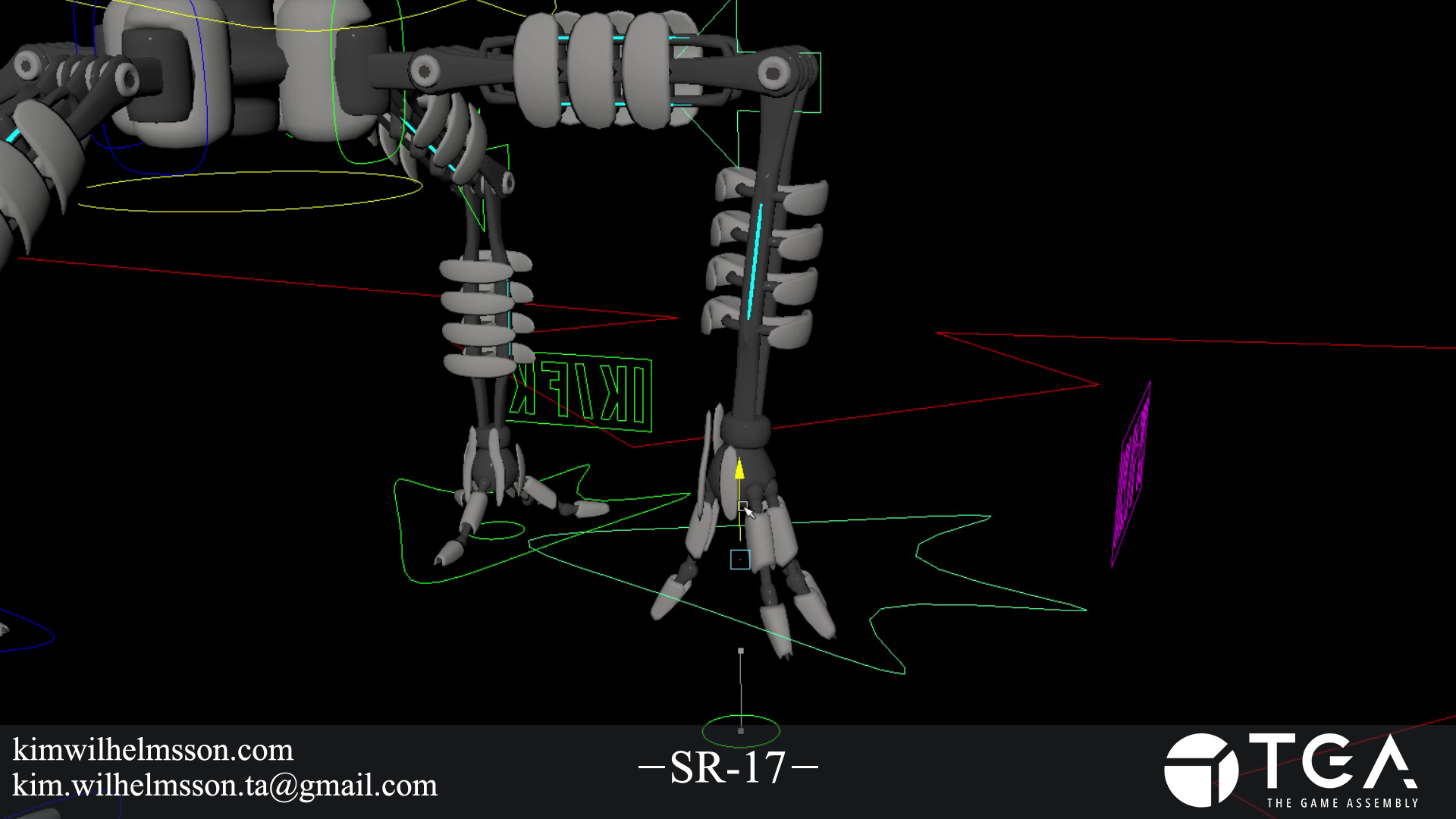
Since I have had a soft spot for robots for a long time I decided that is what I wanted to rig, that is when I found this model alekrazum and I thought it looked like a perfect challenge. Since this was my first time rigging something else than a biped I spent a lot of time researching different kinds of machinery rigs and how to best go about them, I even ended up researching spider rigs, given the appearance of the robot. I also added some additional features that was not included in the original model, such as the eyelids and other various parts of the body.
During my time with this project I also spent a lot of time delving into Python/PyMel scripting, in order to make my workflow faster, such as creating an IK and FK joint chain with relevant controls and creating various control shapes.